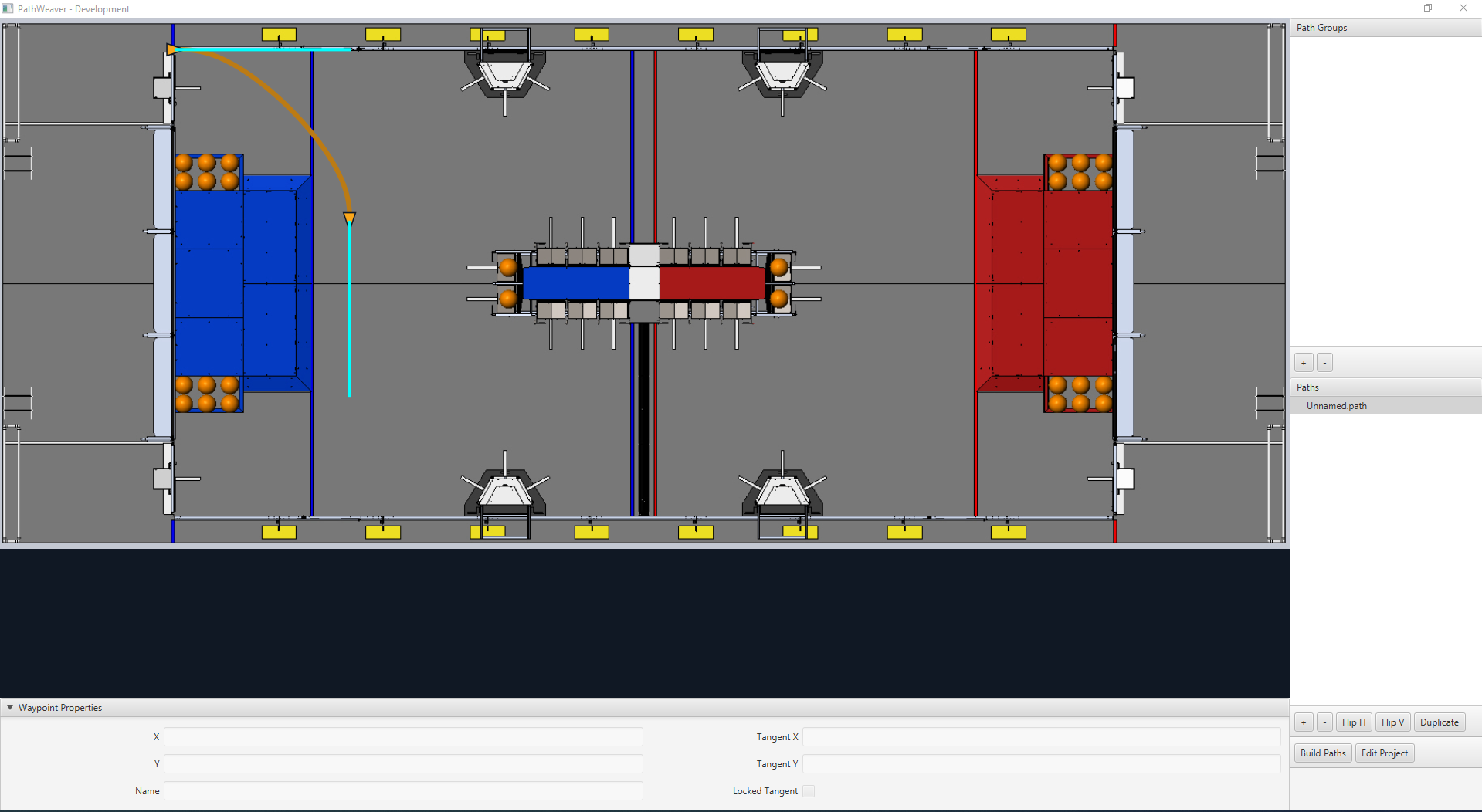
In previous years we haven’t really done much for the autonomous period of the game, so this year we are planning on using Path Weaver to move the robot to the scoring tower and are looking into using some different sensors to increase the data that we can use for navigation.
We attempted to follow this tutorial for setting it up on the WPILib website. When we put the code into Visual Studio Code, however, the project would no longer build even though there were no errors. Getting Path Weaver working will be the big project after exams.
A new thing that we are planning on using this year is a limelight. (There is reflective tape around the shooting target that makes a square on the limelight camera). Then we should be able to use the camera during autonomous period and throughout the game for increased accuracy versus lining the robot up manually. We have been looking through WPILib for different things that we can implement with the robot. There is so much that we can do, it is just a matter of figuring out how to do it and taking the time.