Latest Posts
- Using Generative AI
There are a lot of different chat bots that are becoming popular like Perplexity and ChatGPT. While it is fun to see what the AI algorithms come back with, I have really enjoyed using generative AI to produce images. I have used Crayion, Stable Diffusion, and more recently Gemini’s Bard image generator.

Vinyl Record With Floral Growth Although the images generated can be quite chaotic or unrealistic at times, when given the right prompt, these generators can produce interesting and fun images. There are so many key words that they pick up on like styling photos to be photo-realistic, classic, impressionist, hand-drawn, ect. You can pick what ever they draw and add elements like a graffiti or floral look. It is not only a lot of fun, but can be useful when trying to come up with specific images. Here are a couple fun examples that were generated with Bard.

Shooting Star Over A Hill In The Style Of Starry Night - Tall Bike

I recently received a few extra bikes from a friend and decided to try making a tall bike from one of the frames. It is basically just an upside-down bike since I just flipped the frame. The seat post and handle bars needed to be longer since the pedals were so much higher. It took a bit of welding and some work getting the chain tensioned without the derailleur. It’s functional, but also a bit scary being so far from the ground. In the future, I would make the bend for the handle bars closer to the frame, as it is a bit awkward to steer.
- Replacing A Fan’s Thermal Fuse

We bought a decent pedestal fan a couple years back and it randomly died recently. It still didn’t work after cleaning it so, I decided to try bypassing the thermal fuse. It worked, but I couldn’t leave it that way with any peace of mind. After using a magnifying glass to read the small print, I bought a couple new fuses online.
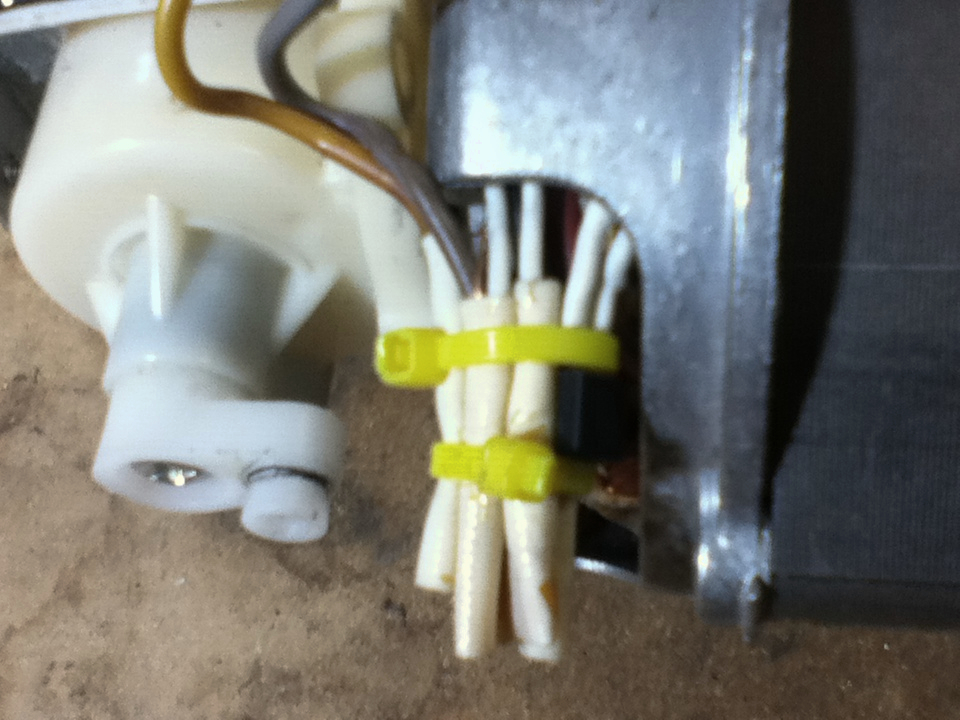
I soldered a new one on, but I got it too hot from the soldering iron. I did it again and left more room between the fuse and the solder point. It works great now, and it just took a cheap little fuse to fix!

Categories
Audio
I love music and have started to play around with free music related software, from fully functional DAWs, to synthesizers, to plugins, and even smaller applications like tuners.
Music
I have been interested in audio and how it forms music for a long time. Recently, I have started to actually make my own music. Through this process, I have learned first hand that it really takes dedication and time to produce music that sounds good. Here I am going to share some of my creations.
Other
I have many other hobbies and until I spend more time on them this is where they will reside.
Robotics
In high school, I was part of a FRC robotics team. I am no longer on the team, but all of my posts are original and are my own work. This website being my blog, I will continue to keep old posts up, just not on my homepage.
Tags
Ardour Arduino Audacity Audio Applications Audio Effects Coding Fitness Food FRC Robotics LEGO LMMS Mechanics Music Musical Instruments Old Tech Tinkering